
Page 2 - Ciappa_Costabile_2014
P. 2
A. Ciappa, S. Costabile / Marine Pollution Bulletin 84 (2014) 44–55 45
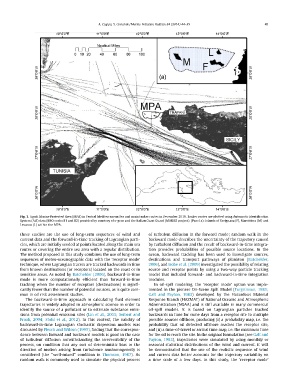
Fig. 1. Egadi Marine Protected Area (MPA) in Central Mediterranean Sea and main tanker routes in December 2010. Tanker routes are plotted using Automatic Identification
System (AIS) data (IMO codes 81 and 82) provided by courtesy of e-geos and the Italian Coast Guard (MARISS project). (Panel a): islands of Favignana (F), Marettimo (M) and
Levanzo (L) within the MPA.
these studies are the use of long-term sequences of wind and of turbulent diffusion in the forward mode; random walk in the
current data and the forward-in-time tracking of Lagrangian parti- backward mode describes the uncertainty of the trajectory caused
cles, which are initially seeded at points located along the main sea by turbulent diffusion and the result of backward-in-time integra-
routes or covering the entire sea area with a regular distribution. tion provides probabilities of possible source locations. In the
The method proposed in this study combines the use of long-term ocean, backward tracking has been used to investigate sources,
sequences of meteo-oceanographic data with the ‘receptor mode’ destinations and transport pathways of plankton (Batchelder,
technique, where Lagrangian tracers are tracked backwards in time 2006), and Isobe et al. (2009) investigated the possibility of relating
from known destinations (or receptors) located on the coast or in source and receptor points by using a two-way particle tracking
sensitive areas. As noted by Batchelder (2006), backward-in-time model that included forward- and backward-in-time integration
mode is more computationally efficient than forward-in-time modules.
tracking when the number of receptors (destinations) is signifi- In oil-spill modeling, the ‘receptor mode’ option was imple-
cantly fewer than the number of potential sources, as is quite com- mented in the pioneer On-Scene Spill Model (Torgrimson, 1981;
mon in oil risk assessment studies. Galt and Payton, 1983) developed by the Hazardous Material
The backward-in-time approach in calculating fluid element Response Branch (HAZMAT) of National Oceanic and Atmospheric
trajectories is widely adopted in atmospheric science in order to Administration (NOAA) and is still available in many commercial
identify the source of a pollutant or to estimate substance emis- oil-spill models. It is based on Lagrangian particles tracked
sions from potential emission sites (Lin et al., 2003; Seibert and backwards in time for some days from a receptor site to multiple
Frank, 2004; Stohl et al., 2012). In this context, the validity of possible sources offshore, producing (i) a probability map, i.e. the
backward-in-time Lagrangian stochastic dispersion models was probability that oil detected offshore reaches the receptor site,
discussed by Flesch and Wilson (1995), finding that the correspon- and (ii) a time-of-travel or arrival time map, i.e. the minimum time
dence between forward and backward models is good in the case for the oil to reach the site. In the original formulation (see Galt and
of turbulent diffusion notwithstanding the irreversibility of the Payton, 1983), trajectories were simulated by using monthly or
process, on condition that any sort of deterministic bias to the seasonal statistical distributions of the wind and current. It will
direction of motion arising from turbulence nonhomogeneity is be demonstrated that the use of the realistic sequence of wind
considered (the ‘‘well-mixed’’ condition in Thomson, 1987). As and current data better accounts for the trajectory variability on
random walk is commonly used to simulate the physical process a time scale of a few days. In this study, the ‘receptor mode’